Constrained Pick and Place
- Raymond Danks
- Jul 19, 2020
- 2 min read
Updated: Dec 30, 2021
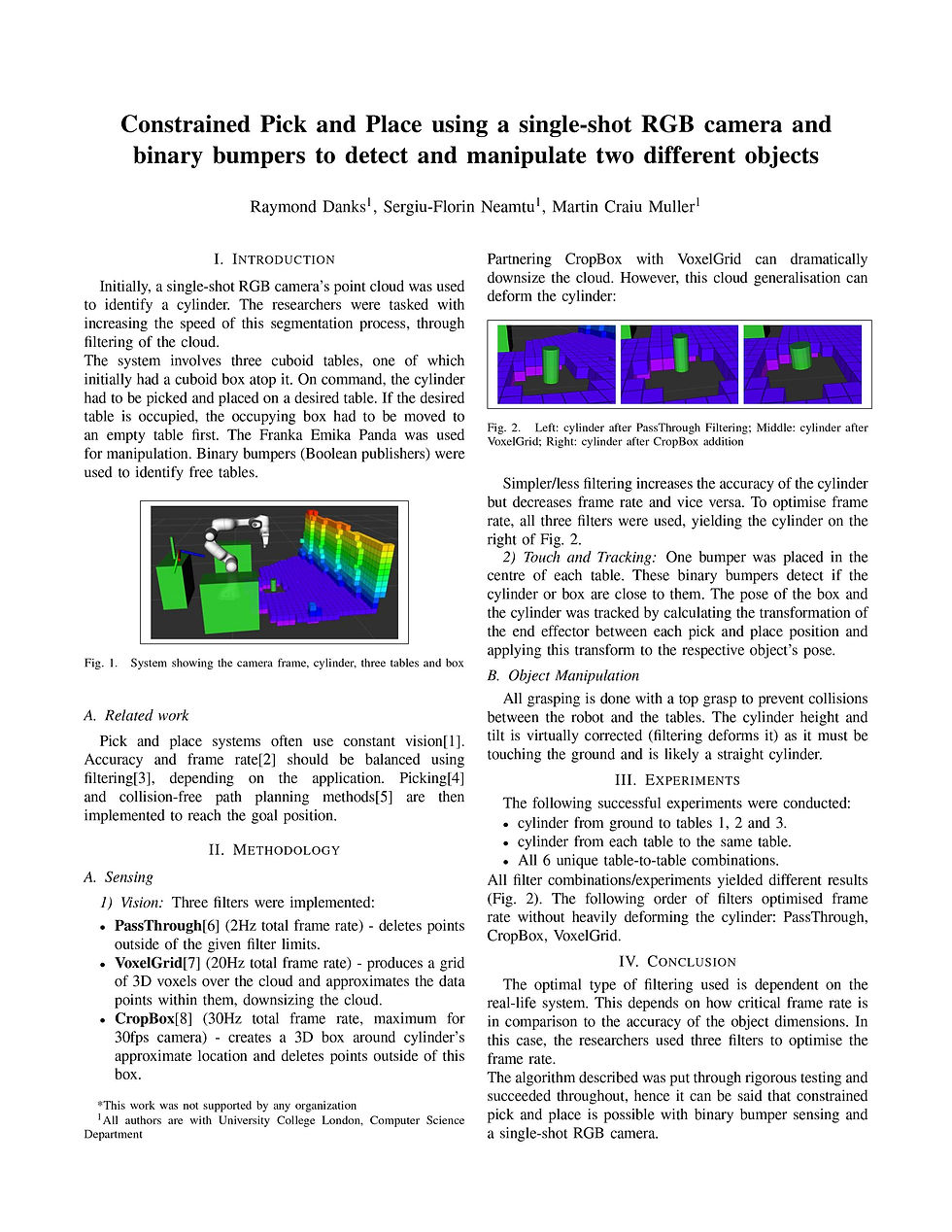
This is a constrained Pick and Place system created to control the Franka-Emika Panda Robot.
The system begins with the Franka-Emika Panda robot stationary and a cylinder sat on the ground.The robot is in the centre of three orthogonal tables.
The keyboard keys 1, 2 and 3 should then be pressed, each number representing a table. The cylinder should then be moved to this table. This is the objective of the system.
However, in the start case, there is originally an extra "box" on the second table. Therefore, in order to move the cylinder to this table, the box must be moved to a free table (hence the "constrained" condition).
The code and some additional details of this system can be found on my personal GitHub:
UPDATE: By request, in order to ensure academic integrity, this code has been removed.
All of the sensing is done via virtual bumpers/pressure sensors exept the initial detection ofthe cylinder on the ground, which uses a point cloud from a camera. The virtual bumpers were created and programmed by the team (each bumper has its own ROS topic to publish its status) .Intensive and edge-case testing was carried out on this system (eg. spamming different modes and testing edge cases) to see how the system dealt with it and to fix bugs - resulting in a robust system. Fixed Stamped Transforms and tracking of robotic poses was used to avoid collisions with the physical environment (shown using Gazebo) and to accurately move the arm to the correct locations.
A further analysis by the team (incl. me) who created this system is given below, in a succinct and academic report-style format:
REFERENCES
[1] I. Karabegovi´ c, New Technologies, Development and Application II, ser. Lecture Notes in Networks and Systems. Springer International Publishing, 2019.
[2] G. Dudek and M. Jenkin, Computational Principles of Mobile Robotics, 2nd ed. New York, NY, USA: Cambridge University Press, 2010.
[3] X. Xu, H. Yang, and I. Neumann, Time-efficient Filtering Method for Three-dimensional Point Clouds Data of Tunnel Structures. SAGE Publications Limited, 2018.
[4] M.Mason,MechanicsofRoboticManipulation,ser.IntelligentRobotics and Autonomous Agents series. MIT Press, 2001.
[5] R. Zhao, “Trajectory planning and control for robot manipulations,” Ph.D. dissertation, 2015. [6] PCL, “pcl::passthrough¡ pointt ¿ class template reference.” [Online]. Available: http://docs.pointclouds.org/1.8.1/classpcl 1 1 pass through.html
[7] ——, “pcl::voxelgrid¡ pointt ¿ class template reference.” [Online]. Available: http://docs.pointclouds.org/1.8.1/classpcl 1 1 voxel grid.html
[8] ——, “pcl::voxelgrid¡ pointt ¿ class template reference.” [Online]. Available: http://docs.pointclouds.org/1.8.1/classpcl 1 1 voxel grid.html

Comments